BinSpect®
Bulk goods can be processed just as well as palletized goods in automated production thanks to bin picking technology. Take advantage of object recognition and automatic path planning in your production.
Bin Picking
Instead of monotonous, physically strenuous and unergonomic manual work, bulk material can be separated by a robot with the BinSpect principle and fed to the further machining process.
The possible parts spectrum ranges from small parts to components with a mass of several kilograms.
Thanks to advanced sensor technology, robust position detection is possible even for components with difficult surfaces. Use the technology to empty boxes and other goods carriers in a completely automated way in the future.
Read how BinSpect® has eased the burden on Daimler employees.


{kind=link}
{kind=link}
Your advantages
Separate chaotically provided parts reliably with the Binspect® system. We configure a system with a suitable robot and gripper for you.
Separates chaotic bulk material
Applicable to a wide range of individual parts
Cost-efficient
Thanks to short cycle time and autonomous operation, the system amortizes in a short time
Low noise operation
Significantly lower noise pollution than the use of vibrating tables
Space saving
The required installation area is smaller than mechanical sorting systems
Low maintenance
Reliable system without wearing parts
Quickly adapted to new components
The system can be adapted to new tasks at low cost if the product geometry changes
We carry out regular tests with customer components and are curious to see what components you have in store for us!
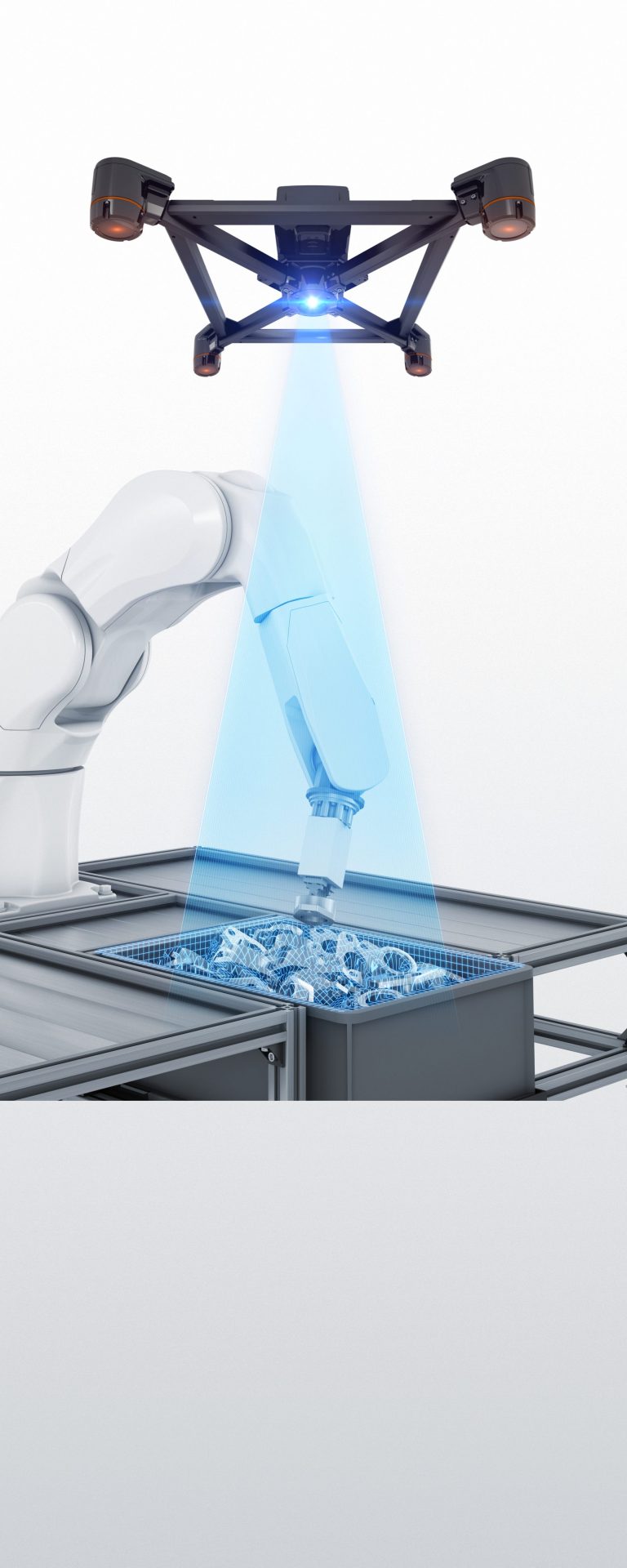
How does bin picking work?
At the heart of our BinSpect solution is a 3D camera system that captures the product carrier together with the bulk material. The data is compared with CAD files of the components to be gripped by means of image processing and other algorithms.
The goal is the precise localization of parts that can be gripped. As soon as removable parts have been identified, the optimum robot path is automatically calculated, taking interference contours into account, and transmitted to the robot. The robot then moves to the identified part and grips it reliably.

More solutions
Processing
Handling
Robot Vision
Mobile Robotics
- Automated Machine Loading and Unloading
- Palletizing and Depalletizing
- Testing