Binspect®
Schüttgut lässt sich dank der „Griff-in-die-Kiste“-Technologie in einer automatisierten Fertigung genauso gut vereinzeln wie palettierte Ware.
Schüttgut vereinzeln
Statt durch monotone, körperlich anstrengende und unergonomische Handarbeit, kann Schüttgut mit dem BinSpect Prinzip von einem Roboter vereinzelt und dem weiteren Bearbeitungsprozess zugeführt werden.
Das mögliche Teilespektrum reicht von Kleinteilen bis zu Bauteilen mit mehreren Kilogramm Masse.
Dank fortschrittlicher Sensortechnologie ist eine robuste Lageerkennung selbst bei Bauteilen mit schwierigen Oberflächen möglich. Nutzen Sie die Technologie, um Boxen und andere Warenträger in Zukunft restlos automatisiert zu entleeren.
Erfahren Sie hier, wie die Mitarbeiter von Daimler durch das BinSpect® System entlastet wurden.


{kind=link}
{kind=link}
Ihre Vorteile durch das vereinzeln von Schüttgut
Vereinzeln Sie chaotisch bereitgestellte Teile mit dem BinSpect® System. Wir konfigurieren Ihnen ein System mit passendem Roboter und Greifer. Nutzen Sie die Vorteile der Objekterkennung und automatischen Bahnplanung in ihrer Produktion.
Vereinzelt chaotisches Schüttgut
Anwendbar auf eine große Bandbreite an Einzelteilen
Wirtschaftlich
Dank kurzer Taktzeit und autonomem Betrieb amortisiert sich das System in Kürze
Geräuscharmer Betrieb
Wesentlich geringere Lärmbelästigung als beim Einsatz von Rütteltischen
Platzsparend
Schlanke Roboterkinematik erfordert geringe Aufstellfläche.
Wartungsarm
Zuverlässiges System ohne Verschleißteile
Schnell auf neue Bauteile adaptiert
Kostengünstige Anpassung bei geänderter Produktgeometrie
Wir führen regelmäßige Tests mit Kundenbauteilen durch und sind gespannt, welche Bauteile Sie für uns bereit halten!
Kontaktieren Sie uns gerne, um individuell zugeschnittene Lösungen für Ihren Betrieb zu finden.
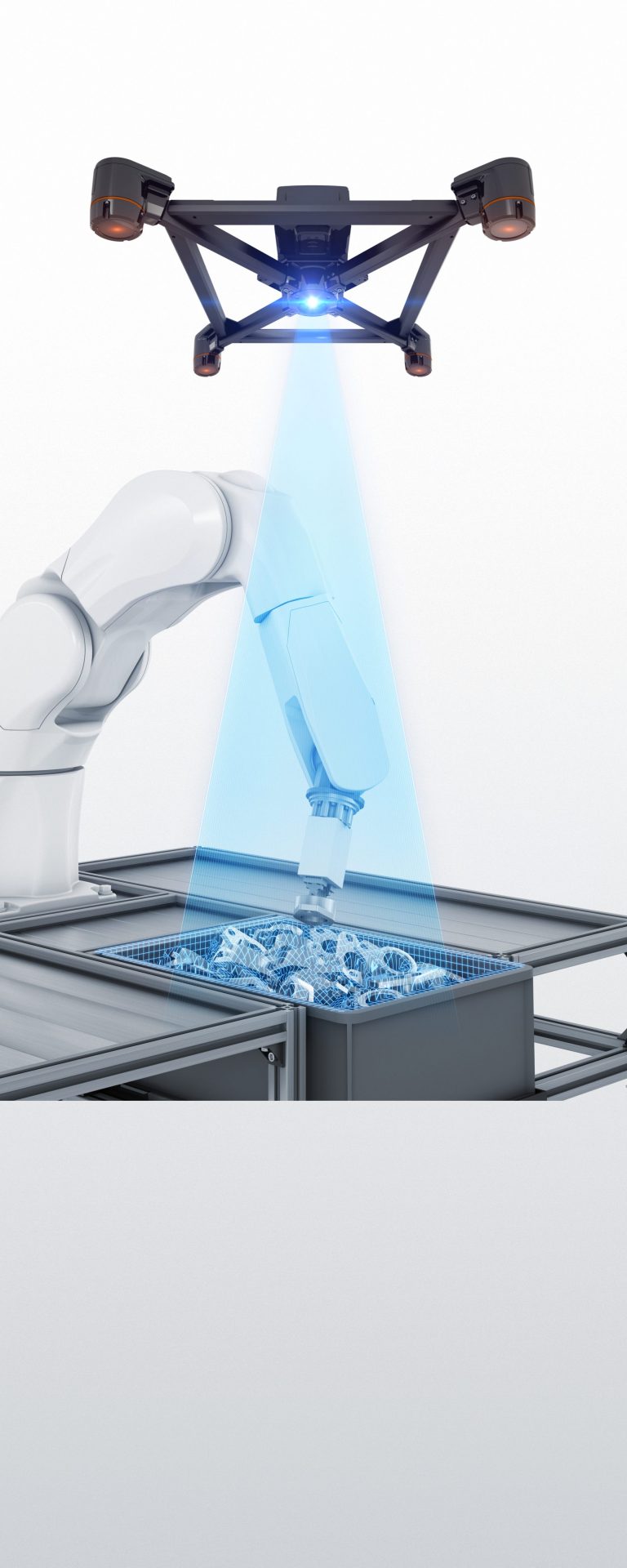
Wie funktioniert der Griff in die Kiste?
Herzstück unserer BinSpect Lösung ist ein 3D-Kamerasystem, das den Warenträger samt Schüttgut erfasst. Die Daten werden mittels Bildverarbeitung und weiteren Algorithmen mit CAD Dateien der zu greifenden Bauteile abgeglichen.
Ziel ist die genaue Lokalisierung von greifbaren Teilen. Sobald entnehmbare Teile identifiziert sind, wird unter Berücksichtigung von Störkonturen automatisch die optimale Roboterbahn berechnet und an den Roboter übermittelt. Dieser fährt zum ermittelten Bauteil und greift dieses zuverlässig.
